Research
Fundamental 3D Perception Research
We develop novel signal processing, sensor fusion techniques and optimization techniques for 3D localization and mapping. Our topics of interest include:
Acquisition: geometry, calibration, time synchronization, infrared imaging, multi-spectral imaging
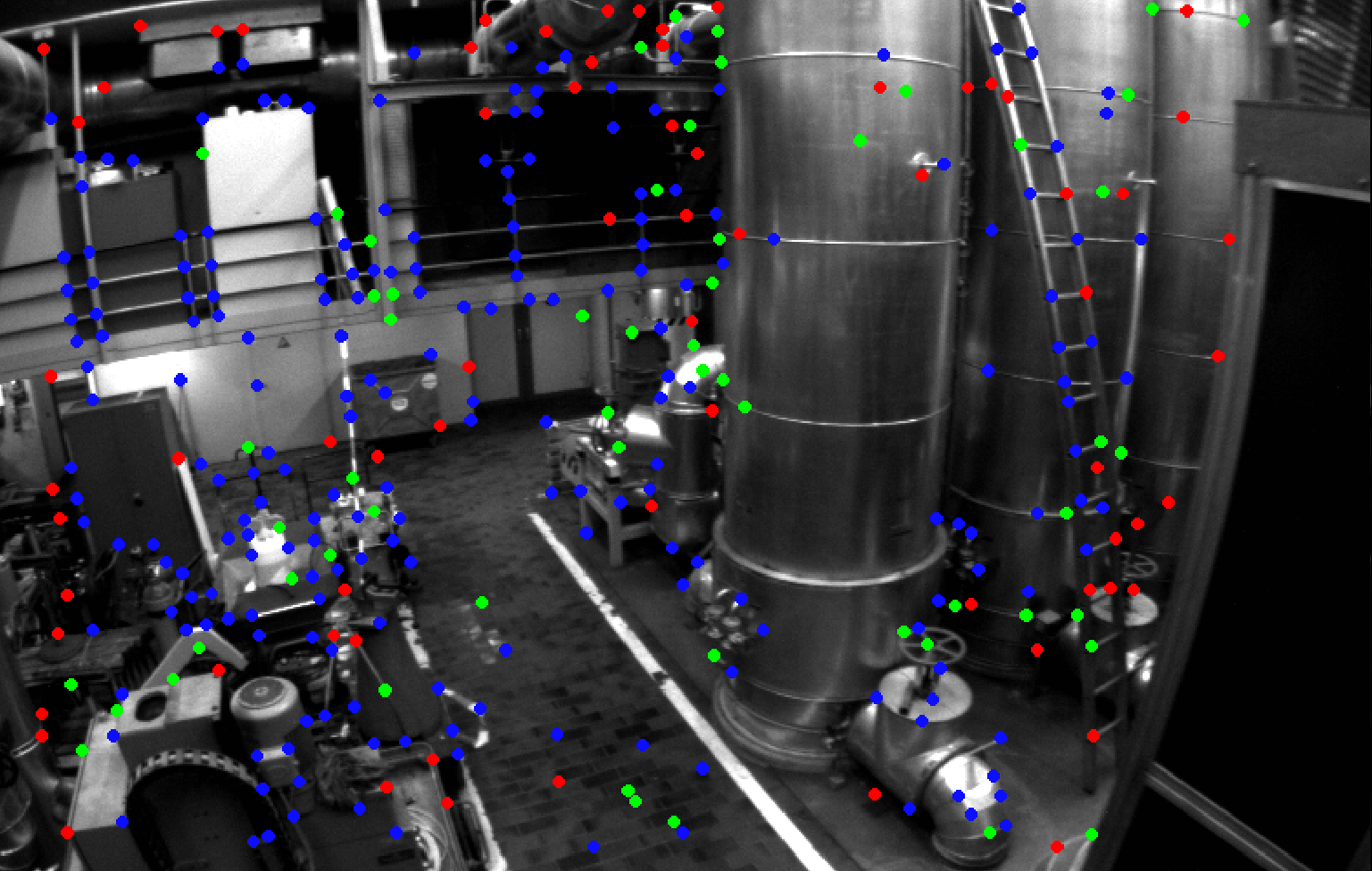
Analysis: feature detection and description, shape recognition, segmentation, motion estimation and tracking
Sensor fusion: multi-modal data integration, state estimation, filtering, non-linear optimization, continuous-time optimization
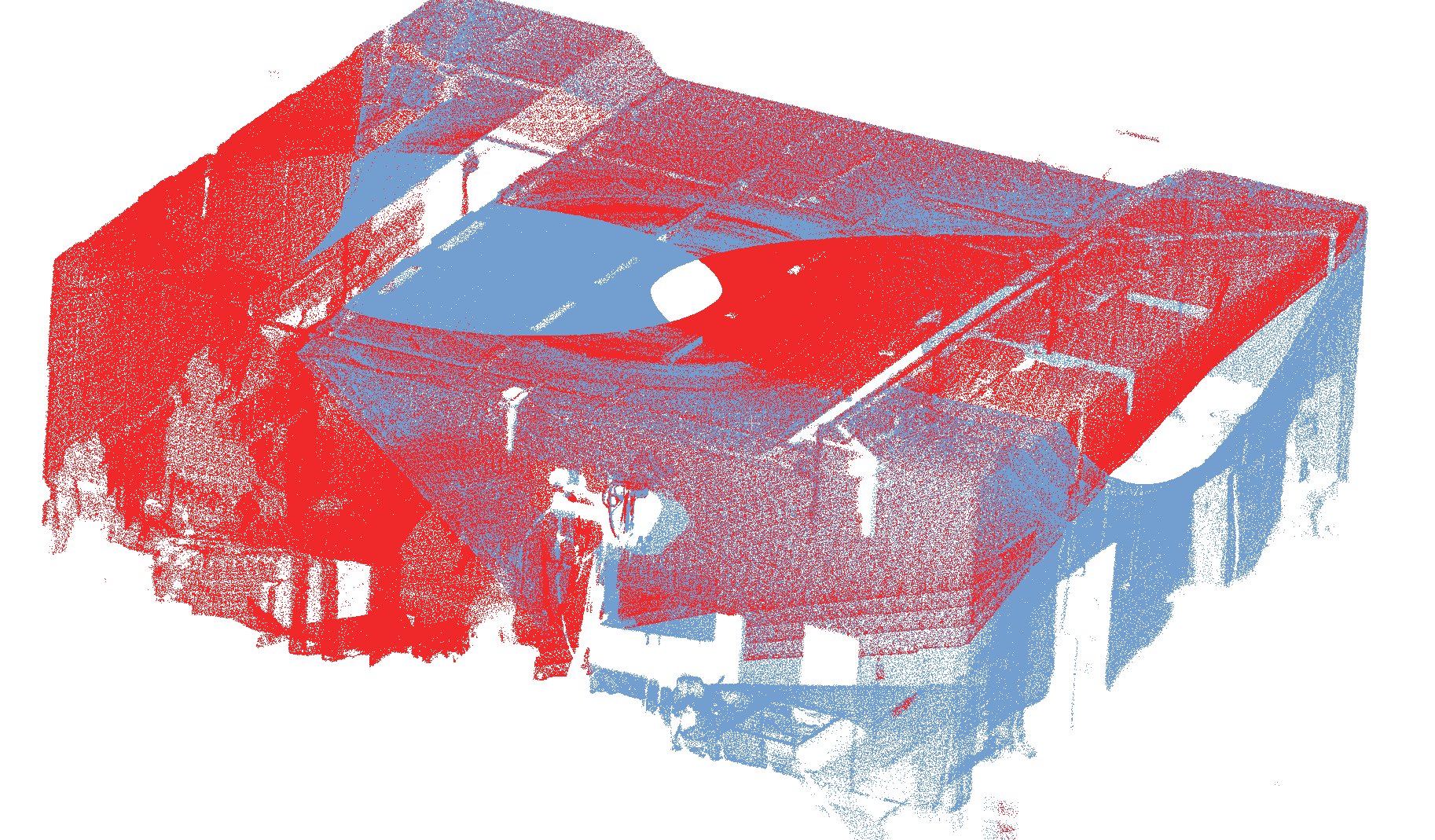
Reconstruction: structure from motion, multi-view stereo, dense mapping, simultaneous localization and mapping
Rendering: 3D data visualization, neural rendering, synthetic data generation
Some example developments include:

3D Perception for Downstream Applications
Collaborating with other departments and research units, we deliver state-of-the-art 3D perception systems used as a component in other systems for applications such as:
- Autonomous systems: robotics, drones, self-driving vehicles, path planning
- Augmented and virtual reality: AR/VR environments, spatial tracking, human-computer interaction, immersive rendering
- Demining: mine or threat detection and classification
- Geospatial mapping: 3D mapping for situational awareness, digital twins
Some example developments include:


